TL;DR
- Shannon expansion is the formula for decomposing a Boolean function into a single MUX.
- cofactor is "a new function that fixes one variable to 0/1" so that that variable disappears inside the cofactor.
- Boolean difference is a sensitivity function that computes "does the output change when the input x is flipped?".
- ∃(existential) quantification is a formula for "only one solution needs to exist," which is the core of the SAT.
- Why optimization is hard: SAT only needs to find one solution, optimization needs to compare all candidates.
1. Problem: When Karnaugh map breaks
1.1 40 variables, the Karnaugh map is over
- 2^40 scale → "I can draw it, but I can't write it"
- Conclusion: we should treat Boolean functions as data structure + operator, not by hand.
1.2 The 3 things this article targets
- decomposition (decomposition)
- computation (representation that a program can handle)
- application (computation directly in EDA)
2. Shannon cofactor: a new function created by "fixing a variable"
2.1 Definition: A cofactor is a substitution
- For an input variable x in f, the
- positive cofactor: ( f_{x} = f(x=1) )
- negative cofactor: ( f_{~{x}} = f(x=0) )
2.2 Key point: "This is a new function, x disappears"
- We have fixed x to 0/1, so x can no longer appear in the result.
- If you miss this, all subsequent Boolean difference/quantification falls apart.
2.3 (short example)
- Example: ( f(x,y,z) = xy+x~z+~xyz )
- ( f(x=1) = y + \bar{z} ) (can be simplified)
- ( f(x=0) = yz )
3. Shannon expansion: "Boolean function = MUX" ends as soon as you see it
3.1 Theorem (Shannon expansion theorem)
For any f and any variable x:
f=x⋅f(x=1)+~x⋅f(x=0)
3.2 Hardware perspective: Shannon expansion = 2:1 MUX
- select = x
- data1 = f(x=1)
- data0 = f(x=0)
- output is f
📌 This is where the "branch" sense comes in:
- When we go down the x=0 branch, we only need to look at f(x=0)
- When we go down the x=1 branch, we only need to look at f(x=1)
3.3 MUX tree = recursive decomposition
- 1 variable → 2 branches
- 2 variables → 4 branches
- k variables → 2^k branches
- This looks like "enumeration", but EDA does pruning here. (explained later)
[Figure 1] Shannon expansion as a 2:1 MUX
[Figure 2] Illustration of a MUX tree where a 2-variable expansion creates four leaves
4. cofactor means "operations are exchanged": 계산이 쉬워지는 이유
4.1 A very important property
- complement:
- (~f)x=~(𝑓𝑥)
- AND/OR/XOR can do the same "cofactor first → operation later" thing
- (𝑓∧𝑔)𝑥=𝑓𝑥∧𝑔𝑥
In other words, you don't make a big expression and then cofactor it, you
cofactor first to make the expression smaller and then calculate it.
5. Boolean difference: "sensitivity" as a formula
5.1 Definition
∂f/∂x=f(x=1)⊕f(x=0)
5.2 Meaning: "The condition that the output changes when x is flipped"
- XOR is "1 if different"
- So, for an input pattern with a Boolean difference of 1:
- Changing x by 0→1 or 1→0 will definitely change f
5.3 Sensitivity by Example
- inverter: f=~x
- 𝑓(1)=0,𝑓(0)=1⇒∂𝑓/∂𝑥=1
- Always sensitive
- AND: ( f=xy )
- 𝑓(1)=𝑦,𝑓(0)=0⇒∂𝑓/∂𝑥=𝑦
- Change in x affects output only when y=1
- OR: ( f=x+y )
- 𝑓(1)=1, 𝑓(0)=𝑦 ⇒ ∂𝑓/∂𝑥=~𝑦
- affects only when y=0
5.4 The correct interpretation of "x has no logical effect on F?"
- Doesn't mean "always no effect".
- It means that under certain input conditions it may have no effect.
- Picking out those conditions is a Boolean difference.
[Figure 3] Gate illustration of why Boolean difference is y / ȳ in AND/OR
6. Quantification: “변수 제거”를 목적 함수로 만든 연산
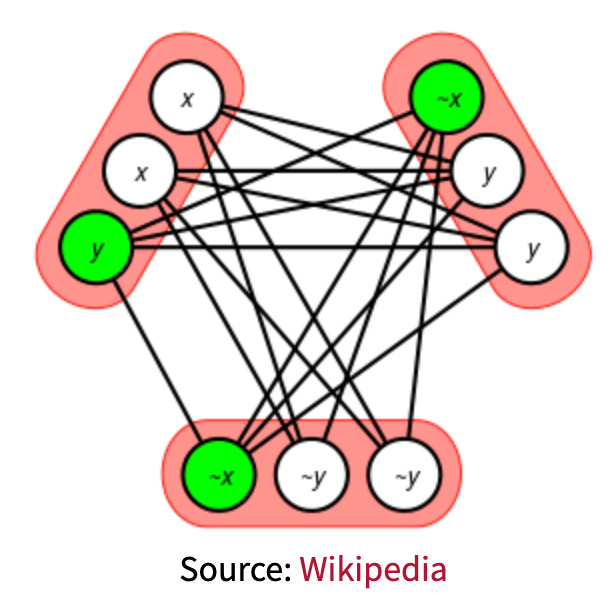
6.1 existential quantification (∃): "only one solution is required"
∃xf=f(x=0)∨f(x=1)
- Meaning: Given other inputs fixed, does choosing x well result in f=1?
6.2 universal quantification (∀): "must be true in all cases"
∀xf=f(x=0)∧f(x=1)
- Meaning: Is f=1 always true no matter what x is?
6.3 1:1 correspondence with the sentence you said
"You don't have to enumerate them all, just find any one year"
This is exactly what you did:
∃ quantification
- And the core form of the SAT:∃X:F(X)=1
7. SAT vs Optimization: Why "Optimization" is Tighter
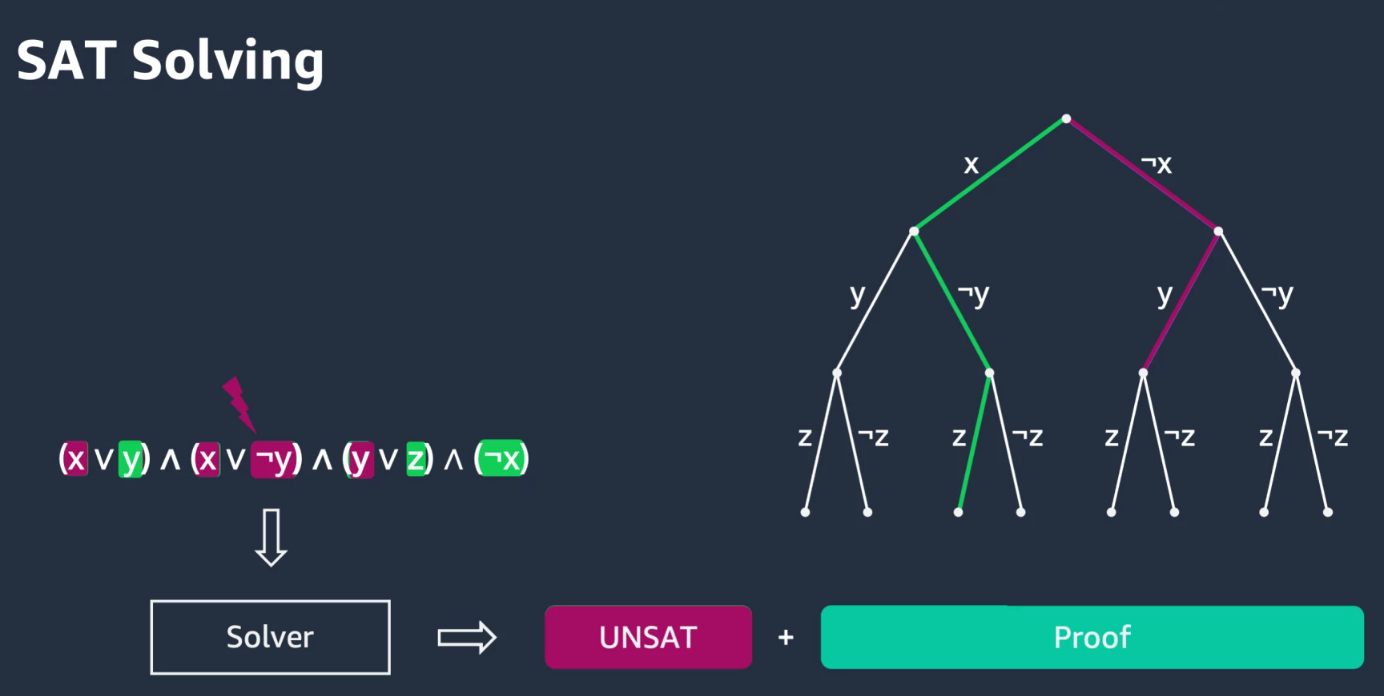
7.1 SAT is "find one and done"
- Ends when a solution exists that satisfies the condition
- Can be terminated (pruning)
7.2 Optimization is "comparison is the essence"
- To prove that there is a better solution
- You need to keep looking at other branches
- That's why EDA optimization is structurally hard (which leads to the NP-hard story)
[Figure 4] SAT stops at first satisfaction, Optimization continues to explore
다음 강의로 자연스럽게 연결: Tautology와 URP
8.1 Is a tautology "always 1?"
- f≡1?
- Key idea: if f is a tautology ⇔ f(x=0) and f(x=1) are both tautologies
8.2 URP's intuition
- Decomposition into Shannon coefficients (branching)
- Terminate right in the middle (strong pruning)
- Ends up not being an "enumeration" algorithm, but a "throw away what you can" algorithm
이 글에서 반드시 가져가야 하는 5개
- cofactor는 substitution이며, in the resulting function, the variable disappears
- Shannon expansion is both a formula and a 2:1 MUX model
- Boolean difference is a function that gives "the conditions under which a change in x affects the output"
- ∃ quantification implements "only one is needed" as an OR
- SAT is one and done, Optimization takes longer because of comparisons